
Počítačové videnie v kocke III. – Spracovanie videozáznamu
Čo sa týka úloh pre spracovanie videozáznamu, spomenuli sme v predchádzajúcich článkoch detekciu pohyblivých objektov a trasovanie objektov . Pri probléme detekcie pohyblivých objektov je úlohou nájsť pohybujúce sa objekty v zábere videa. Zložitosť tejto úlohy závisí od toho, či sa jedná o záber zo statickej či pohyblivej kamery, ako veľmi dynamické je pozadie scény záberu, atď. V súčasnosti už existuje množstvo algoritmov, ktoré riešia tento problém. Napríklad pri statickej kamere je snaha vytvoriť model pozadia a pohyblivé objekty získať „odčítaním“ modelu a pozadia. K dispozícii sú ale už aj sofistikovanejšie algoritmy, kde však môže narastať výpočtová náročnosť. Pre praktické aplikácie je preto často požadované, aby vedel algoritmus spracovať videozáznam v reálnom čase.
Rovnako je to aj pri trasovaní, kde riešime problém sledovania objektu v zábere. Vstupom pre trasovací algoritmus je počiatočná poloha objektu v rámci záberu, a našou úlohou je sledovať pohyb tohto objektu. Počiatočná poloha môže byť získaná napríklad použitím už spomenutej detekcie objektov. V úlohe trasovania robí problémy najmä prekrývanie trasovaného objektu s inými objektami či s pozadím, zmena vzhľadu a veľkosti objektu, či splývanie objektu s pozadím. Na tento problém opäť existuje veľké množstvo metód, s rôznou úrovňou presnosti a výpočtovej zložitosti. Často sa tu používajú algoritmy ako konvolučné a rekurentné neurónové siete, Kalmanov filter či diskriminatívne klasifikátory. Praktické využitie týchto algoritmov môžeme potom nájsť v bezpečnostných systémoch, navádzacích systémoch, pri štatistických meraniach či v autonómnych vozidlách.
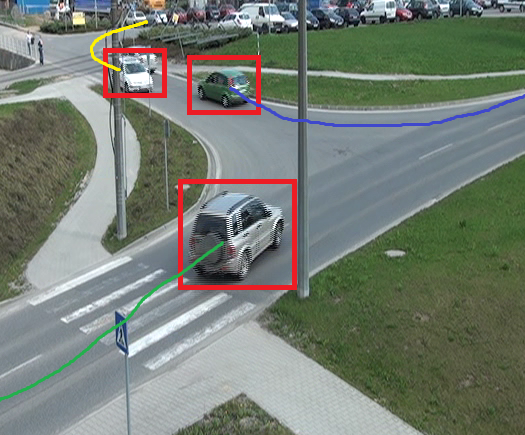
zdroj: Juraj Muráň, Generické trasovanie zamerané na jeden cieľový objekt
Celkovo je oblasť počítačového videnia momentálne veľmi populárna a je predmetom aktívneho výskumu. Vývoj nepretržite napreduje a neustále sú skúmané a vytvárané nové algoritmy a techniky na spracovanie obrazu. Pre statický obraz (obrázok, fotka) najčastejšie riešime konkrétne úlohy ako je klasifikácia, lokalizácia, detekcia objektov či segmentácia obrazu. Týmto úlohám počítačového videnia, sme sa venovali v predchádzajúcich článkoch.
Zdroje:
http://www.siliconmentor.com/road-and-lane-detection-different-scenarios-and-models/
https://machinelearningmastery.com/applications-of-deep-learning-for-computer-vision/
https://chaosmail.github.io/deeplearning/2016/10/22/intro-to-deep-learning-for-computer-vision/